分布式应用运行时操作系统(Distributed Application Runtime OS)设计文档
本文档描述一个面向 应用(Application) 的、分布式的运行时操作系统—— D-AROS(Distributed Application Runtime Operating System) 的设计目标、责任边界、核心抽象与总体架构,用于指导工程实现、系统评审与长期演进。
1. 背景与问题定义
1.1 背景
随着应用形态从单体程序演进为跨节点、跨资源池的分布式系统,传统单机操作系统在进程管理、调度与资源隔离层面提供的能力,已无法覆盖"应用整体运行态"的管理需求。
在云原生体系中,Kubernetes在工程实践上成功解决了以下关键问题:
- 容器化执行环境的标准化
- 基础资源抽象(CPU / Memory / Device)
- Pod级别的调度、自愈与扩缩容
然而,Kubernetes的设计目标是一个通用的集群操作系统(Cluster OS),而非面向"应用语义"的运行时系统。
1.2 现有方案的结构性不足
在大规模分布式系统实践中,现有方案逐渐暴露出以下结构性不足:
-
缺乏应用级抽象 Kubernetes以Pod / Workload为中心,无法原生表达"一个应用由多个组件组成,并具有整体运行目标"的概念。
-
调度缺乏业务裁决能力 调度决策以资源可行性为核心,难以统一处理SLA、优先级、成本等业务级约束。
-
PaaS平台能力退化 多数PaaS平台仅对Kubernetes API进行CRUD封装,而未真正承担运行时控制平面的职责。
1.3 问题定义
是否可以在现有分布式内核之上,引入一个以应用(Application)为一等公民的运行时操作系统抽象,用于统一描述、裁决与控制分布式应用的运行状态?
D-AROS即为对此问题的系统化回答。
2. 系统定位与责任边界(核心约束)
2.1 系统定位
D-AROS的系统定位是:
位于集群操作系统之上的分布式应用运行时操作系统(Application Runtime OS)
它不直接管理物理资源,也不承载业务逻辑,而是负责:
- 描述应用"应该如何运行"
- 在多应用之间进行运行时裁决(Arbitration)
- 将裁决结果下发给底层集群内核执行
2.2 分层视图
┌────────────────────────────────┐
│ Application / Platform Layer │ ← 业务系统 / CI/CD / 控制台
├────────────────────────────────┤
│ D-AROS Runtime OS │ ← 应用模型 / 生命周期 / 裁决
├────────────────────────────────┤
│ Cluster OS (K8s / Nomad) │ ← Pod / Task 调度与执行
├────────────────────────────────┤
│ Infrastructure Layer │ ← 物理机 / 网络 / 存储
└────────────────────────────────┘
2.3 责任边界定义
D-AROS的职责(必须承担):
- 应用运行时抽象建模
- 应用生命周期状态机管理
- 应用级资源裁决与优先级控制
- 调度策略与机制解耦
D-AROS明确不承担的职责(Non-Goals):
- 不管理物理节点生命周期
- 不实现容器/Pod级调度(复用底层Cluster OS能力)
- 不替代Kubernetes/Nomad的核心能力
- 不提供完整的PaaS用户界面
- 不内置复杂的CI/CD流水线
- 不处理应用级别的数据持久化与备份
- 不直接提供跨云网络连接
任何越过该边界的设计,都会导致系统复杂度失控。
2.4 为什么 Kubernetes Scheduler 不适合作为应用调度器
这一节用于明确Kubernetes的调度器边界,解释为什么它不能直接承担"分布式应用运行时操作系统"中 应用级调度器(Application Scheduler) 的职责,从而为"为什么需要在K8s之上构建一层应用运行时系统"提供技术上的正当性。
2.4.1 Kubernetes Scheduler的设计目标
Kubernetes Scheduler的核心职责是:
为Pod选择一个合适的Node
其调度决策围绕以下问题展开:
- 这个Pod能不能放到某个Node上?(Predicate / Filter)
- 放到哪个Node上"更合适"?(Priority / Score)
它关注的核心维度包括:
- CPU / Memory / Ephemeral Storage等节点级资源
- Node Label / Taint / Toleration
- Pod Affinity / Anti-Affinity
- Topology Spread Constraints
👉 本质上,Kubernetes Scheduler是一个「节点资源调度器」,而不是应用调度器。
2.4.2 应用调度器需要解决的问题(K8s Scheduler不关心)
在"分布式应用运行时操作系统"的语境下,一个应用调度器通常需要解决:
- 应用由哪些组件组成?(Service / Worker / Actor / Task DAG)
- 组件之间的启动顺序、依赖关系、生命周期编排
- 应用级QoS(SLA、延迟、吞吐、可用性)
- 应用级弹性策略(Scale Out / Scale In / 灰度 / 回滚)
- 应用整体的资源预算与成本约束
- 应用状态与运行时上下文(Session / Workflow / State)
这些问题具有明显特征:
- 跨Pod
- 跨Node
- 跨时间(生命周期、阶段性状态)
👉 Kubernetes Scheduler 不具备"应用整体视角"。
2.4.3 调度粒度不匹配:Pod ≠ Application
Kubernetes Scheduler的调度对象是:
- 单个Pod
而在目标系统中,调度对象是:
- 一个完整的"应用实例"
- 或一个应用的运行阶段(Phase / Stage)
例如:
- 一个流式计算应用需要先启动Coordinator,再启动Workers
- 一个AI任务需要GPU Worker与Parameter Server协同调度
- 一个在线应用需要保证Web + Cache + DB Proxy的拓扑一致性
这些都无法用"一个Pod放到哪个Node"来表达。
👉 Pod 调度是必要条件,但不是充分条件。
2.4.4 无法表达应用级调度约束
Kubernetes Scheduler的约束模型主要是:
- Node维度约束
- Pod之间的简单亲和/反亲和关系
但应用调度器常见的约束包括:
- "这个应用最多只能占用整个集群20%的资源"
- "该应用的副本必须分布在至少3个机架"
- "当下游组件未Ready时,不允许上游扩容"
- "同一租户的应用之间需要公平调度"
这些约束:
- 无法自然映射到Pod-Level Scheduling
- 即使勉强实现,也会导致Scheduler插件极度复杂
2.4.5 扩展Kubernetes Scheduler的代价
理论上,可以通过:
- Scheduler Framework
- 自定义Filter / Score插件
来"增强"Kubernetes Scheduler。
但在工程实践中会遇到:
- Filter/Score插件在调度主路径执行,维护跨Pod的应用级全局状态代价极高
- 调度器状态主要是Node / Pod视角,在插件内部构建和同步应用视图需要额外缓存和一致性机制
- 与K8s内部调度策略强耦合,升级成本高
- 调度器崩溃恢复时,插件中的应用状态无法从K8s存储自动重建
👉 这会把一个应用调度问题,强行塞进一个节点调度器中。
2.4.6 工业界的通用做法
工业界通常采用分层调度(Two-Level Scheduling):
- Kubernetes Scheduler:
- 负责Pod → Node的映射
- 提供稳定、通用的资源分配能力
- 上层应用调度器/运行时系统:
- 决定"是否创建Pod"
- 决定"创建多少Pod"
- 决定"应用处于哪个运行阶段"
典型案例:
- Spark on Kubernetes
- Ray
- Flink
- Argo Workflows
- Volcano(批处理/AI调度)
2.4.7 本系统的定位结论
因此,在本设计中:
- Kubernetes被视为:
分布式资源内核(Distributed Resource Kernel)
- 本系统承担:
应用运行时操作系统(Application Runtime OS)
两者关系为:
本系统通过Kubernetes提供的资源抽象运行,但不试图替代Kubernetes Scheduler,而是在其之上实现应用级调度与运行时管理。
这也是本系统存在的根本技术理由之一。
3. 设计目标与原则
3.1 核心目标
为分布式应用提供类似单机操作系统的能力:
- 可描述的运行态(Describable State)
- 可裁决的资源使用(Arbitrable Resource Usage)
- 可预测的生命周期演进(Predictable Lifecycle)
3.2 设计原则
- Application-first:应用是一等公民
- 声明式驱动:描述期望状态,而非命令式操作
- 策略与机制解耦:机制稳定,策略可演进
- 不重复造轮子:复用成熟的Cluster OS
3.3 核心设计哲学:运行时中立(Runtime-Agnostic)
D-AROS采用运行时中立的设计哲学:
- 控制平面与数据平面解耦:控制平面不感知具体运行时实现细节
- 抽象与实现分离:应用和负载描述与具体执行技术解耦
- 适配器模式:通过Runtime Adapter桥接不同运行时环境
- 失败模型统一:不同运行时的失败被抽象为统一的系统事件
这一哲学使D-AROS能够支持:
- 容器(Linux/Windows)
- 虚拟机
- 物理进程
- 未来可能出现的新的运行时技术
4. 核心抽象与对象模型
本章定义D-AROS的核心对象模型。这些抽象共同构成一个以应用为中心、与具体运行时解耦的分布式应用运行时操作系统内核。
4.1 Application(应用,一等公民)
Application是D-AROS中的最高级抽象单位。
Application表示一个具有整体运行目标、生命周期和资源边界的分布式应用实例。
Application责任描述:
- Application由哪些Workload组成
- Application整体的运行目标(SLA / QoS)
- Application的资源预算与优先级
- Application的生命周期策略
Application不关心:
- 具体运行在哪种操作系统
- 使用哪种运行时技术(容器/虚拟机/进程)
👉 Application是"运行时无关的逻辑实体"。
4.2 Workload(运行负载,运行时无关抽象)
Workload是D-AROS中"可被调度和执行的最小单位"。
与Kubernetes Pod不同,Workload是一个**运行时中立(Runtime-Agnostic)**的抽象。
4.2.1 Workload的核心职责
Workload用于描述:
- 需要被执行的计算单元
- 所需的运行时环境能力
- 资源需求
- 生命周期控制边界
但不直接绑定任何具体执行技术。
4.2.2 Workload抽象结构
Workload
├── RuntimeRequirement
│ ├── RuntimeType
│ └── OSRequirement
├── ResourceProfile
├── LifecyclePolicy
└── RuntimeSpec (Opaque)
4.2.3 RuntimeRequirement
RuntimeRequirement用于显式描述Workload对运行环境的要求:
- RuntimeType
- container
- virtual-machine
- process
- OSRequirement
- linux
- windows
示例(概念性):
runtime:
type: container
os: linux
👉 这是D-AROS支持多运行时的最小、也是最关键的建模点。
4.2.4 RuntimeSpec
RuntimeSpec是对具体运行时的不透明描述:
- 对D-AROS Control Plane不可解析
- 仅由对应的Runtime Adapter理解
示例:
- Container RuntimeSpec:PodTemplate
- VM RuntimeSpec:VM Image / Disk / Cloud-Init
- Windows RuntimeSpec:Service Definition / Binary Path
👉 Control Plane永远不直接依赖RuntimeSpec结构。
4.3 Execution Node(执行节点)
Execution Node表示"可以承载Workload的执行实体"。
Execution Node是对底层计算节点的统一抽象,可能对应:
- Kubernetes Node(Linux / Windows)
- 虚拟化宿主机
- 裸金属节点
4.3.1 Execution Node能力模型
ExecutionNode
├── ResourceCapacity
├── OS
├── SupportedRuntimes
└── RuntimeCapabilities
示例:
- Linux Node
- container ✅
- vm ✅
- windows-container ❌
- Windows Node
- windows-container ✅
- vm ❓
4.4 Resource Pool(资源池)
Resource Pool是对底层资源的逻辑聚合视图。
Resource Pool提供的是:
- 可裁决容量
- 而非具体节点资源
它屏蔽了节点异构性,为调度与裁决提供统一输入。
4.4.1 Resource Pool的管理与映射
- 管理主体:由Platform Admin或自动化工具创建和管理
- 动态发现:基于底层Cluster OS的节点标签、资源类型等条件动态构建
- 映射关系:
- 一个Resource Pool可包含多个底层Cluster OS的Namespace/ResourceQuota
- 一个Execution Node可属于多个Resource Pool(基于标签选择器)
- 用途:作为Tenant配额分配和Application调度的基本单位
4.5 Runtime(运行时)与Runtime Adapter
Runtime是Workload实际执行的技术载体,Runtime Adapter是关键桥梁。
4.5.1 Runtime的系统定位
Runtime位于:
D-AROS Control Plane
↓
Runtime Adapter
↓
Cluster OS / Hypervisor
D-AROS不直接操作:
- Pod
- VM
- Windows Service
而是通过Runtime Adapter间接控制。
4.5.2 Runtime Adapter(关键组件)
Runtime Adapter负责将D-AROS的通用控制指令,翻译为具体运行时的操作。
统一接口示意:
RuntimeAdapter
├── CreateWorkload(workloadSpec) → workloadID
├── StartWorkload(workloadID)
├── StopWorkload(workloadID)
├── DestroyWorkload(workloadID)
├── InspectWorkload(workloadID) → workloadStatus
└── GetRuntimeCapabilities() → capabilities
典型实现:
- Kubernetes Container Runtime Adapter
- KubeVirt / VM Runtime Adapter
- Windows Container Runtime Adapter
- Process Runtime Adapter(未来)
👉 Runtime Adapter是平台可扩展性的唯一入口。
4.6 Application Instance(运行实例)
Application Instance表示Application在某一时刻的具体运行态。
它关联:
- Application Spec
- 一组Workload Instance
- 当前Lifecycle Phase
- Runtime状态汇总
4.6.1 关键属性
ApplicationInstance
├── ApplicationID
├── Version (当前运行的Spec版本号,支持多版本共存与回滚)
├── TenantID
├── CurrentPhase
├── WorkloadInstances[]
│ ├── WorkloadID
│ ├── RuntimeID (由Adapter分配)
│ ├── Placement (ResourcePool/Node)
│ └── Status (Ready/Error/Stopped)
├── ResourceAllocation
├── LastArbitrationResult
└── HealthSummary
4.7 Failure Model(失败模型)
失败被建模为跨层、跨运行时的系统事件,而非单一Pod异常。
4.7.1 失败类型分类
Failure
├── Infrastructure Failure (节点宕机、网络分区)
├── Runtime Failure
│ ├── ContainerCrash
│ ├── VMExit
│ ├── WindowsServiceStopped
│ └── AdapterCommunicationError
├── Application Failure (业务逻辑错误、健康检查失败)
├── Control Plane Failure (D-AROS组件异常)
└── Policy Violation (违反调度或安全策略)
4.7.2 失败处理流程示例
1. 容器崩溃 (Runtime Failure)
2. Runtime Adapter 感知并上报事件
3. D-AROS 事件总线接收事件
4. 根据 Application 的 LifecyclePolicy 决定动作
- 重启 (默认)
- 等待人工介入
- 标记为失败并停止关联组件
5. 通过 Runtime Adapter 执行决策
4.7.3 失败的处理原则
- D-AROS感知失败语义
- Runtime Adapter处理失败细节
- Application Lifecycle决定应对策略
- 所有失败处理必须通过状态机驱动
4.8 抽象设计总结
通过以上模型,D-AROS明确实现了:
- 应用与运行时解耦
- 调度与执行解耦
- 策略与机制解耦
从而支持:
- Linux / Windows混合集群
- Container / VM / 未来运行时
- 应用级调度与裁决
5. 调度与资源裁决模型
5.1 调度问题抽象
调度在D-AROS中被抽象为:
在多应用、多约束条件下的资源裁决问题(Arbitration)
主要约束包括:
- 资源容量限制
- 应用优先级
- SLA / 延迟目标
- 系统整体利用率
5.1.1 术语澄清
- 裁决(Arbitration):D-AROS层面的、应用级的、考虑多维约束的决策过程
- 调度(Scheduling):特指底层Cluster OS(如K8s)将Pod分配到Node的过程
5.2 多级裁决模型
-
准入裁决(Admission Control)
- 校验Application Spec合法性
- 检查Tenant配额
- 应用全局策略过滤器
-
资源裁决(Resource Arbitration)
- 在多应用间分配Resource Pool容量
- 考虑优先级、SLA、亲和性等约束
- 输出应用级资源分配方案
-
放置提示生成(Placement Hint Generation)
- 将应用级分配分解为Workload级放置建议
- 考虑运行时兼容性、拓扑约束
- 输出给Runtime Adapter执行
- 若放置提示生成失败(如无兼容节点),回退至资源裁决阶段重新计算,并记录失败原因
-
运行时调整(Runtime Adjustment)
- 监控实际运行状态
- 触发抢占、降级、重新裁决
5.3 裁决策略插件化
裁决引擎支持可插拔的策略:
- Bin-Pack策略:资源利用率优先
- Spread策略:可用性优先(跨故障域分布)
- SLA-Aware策略:低延迟应用优先
- Cost-Aware策略:成本约束优化
- Fair-Share策略:租户间公平分配
D-AROS仅输出裁决结果,不负责具体节点选择。
6. 应用生命周期管理
本章描述D-AROS如何以应用为一等公民,对分布式应用的运行状态进行建模、控制与演进,并明确生命周期系统在整体架构中的地位与约束。
6.1 生命周期系统的设计目标
D-AROS的生命周期管理并非简单的"状态标记",而是承担以下核心职责:
- 提供全局一致的应用运行状态视图
- 作为运行时控制与裁决的唯一入口
- 约束系统行为,防止控制逻辑失序
- 支撑应用级调度、扩缩容、降级、终止等操作
生命周期系统在D-AROS中的角色,等价于:
单机操作系统中的「进程状态机 + 系统调用边界」
6.2 生命周期对象与状态域划分
6.2.1 生命周期对象
生命周期管理的最小控制对象是:
Application Instance(应用实例)
而非:
- 单个Pod
- 单个Component
- 单个任务或容器
所有生命周期状态,均以Application Instance为粒度。
6.2.2 状态域划分原则
生命周期状态被划分为两类:
- 期望态(Desired State)
- 现实态(Observed State)
Application Spec ← 期望态(用户声明)
Application Status ← 现实态(系统裁决与执行结果)
D-AROS的生命周期系统负责:
- 比较期望态与现实态
- 通过状态迁移,推动系统向期望态收敛
6.3 生命周期状态定义
6.3.1 核心生命周期状态
D-AROS定义如下应用生命周期状态:
| 状态 | 含义 | 可接受操作 |
|---|---|---|
| Created | 应用对象已创建,但尚未参与任何裁决 | UpdateSpec, Delete |
| Admitted | 通过准入裁决,获得运行资格 | UpdateSpec, Delete, Start |
| Rejected | 准入裁决未通过,无法获得运行资格 | Delete |
| Scheduled | 完成应用级调度决策,等待底层执行 | UpdateSpec, Delete, Stop |
| Running | 应用组件已启动并处于正常运行 | UpdateSpec, Delete, Stop, Scale |
| Degraded | 资源不足或策略触发下的降级运行 | UpdateSpec, Delete, Stop, Restore |
| Terminated | 应用已被显式或隐式终止 | Delete(清理资源) |
| Failed | 应用运行失败且无法自动恢复 | Delete, Retry |
6.3.2 状态的语义约束
- 状态是"裁决结果",不是操作命令
- 状态只能由生命周期系统修改
- 外部系统不得绕过状态机直接操纵运行实体
👉 状态不是标签,而是系统的"法律状态"
6.4 生命周期状态机模型
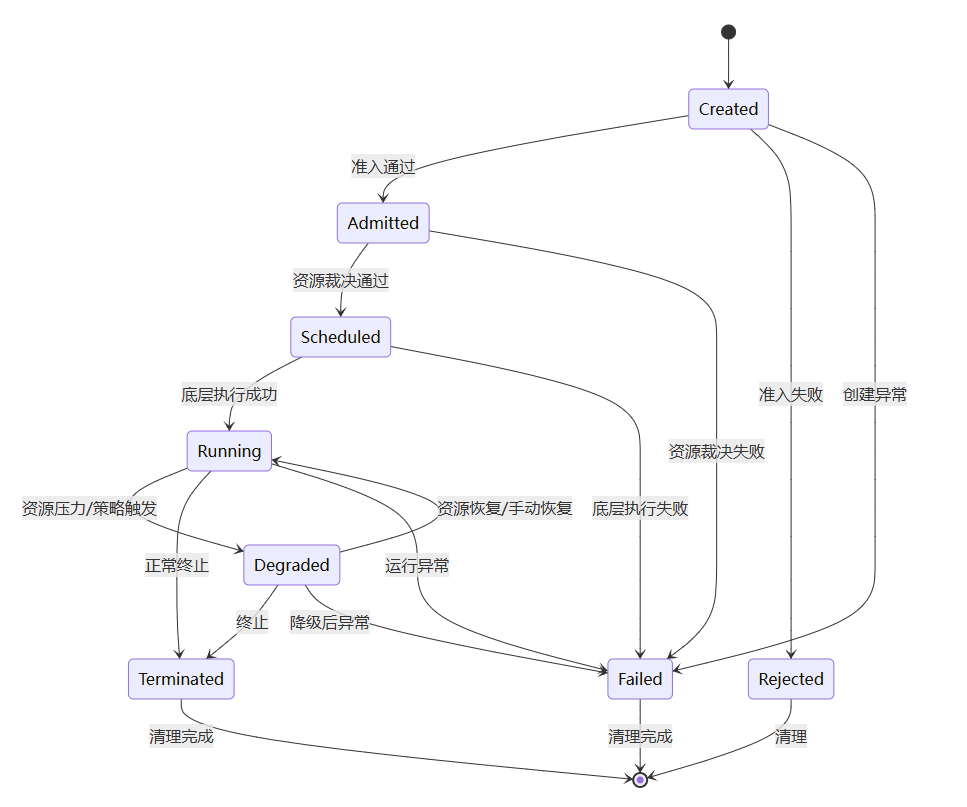
6.4.1 状态迁移总览
stateDiagram-v2
[*] --> Created
Created --> Admitted: 准入通过
Created --> Rejected: 准入失败
Created --> Failed: 创建异常
Admitted --> Scheduled: 资源裁决通过
Admitted --> Failed: 资源裁决失败
Scheduled --> Running: 底层执行成功
Scheduled --> Failed: 底层执行失败
Running --> Degraded: 资源压力/策略触发
Running --> Terminated: 正常终止
Running --> Failed: 运行异常
Degraded --> Running: 资源恢复/手动恢复
Degraded --> Terminated: 终止
Degraded --> Failed: 降级后异常
Rejected --> [*]: 清理
Terminated --> [*]: 清理完成
Failed --> [*]: 清理完成
6.4.2 关键状态迁移说明
Created → Admitted
- 触发条件:
- 应用描述合法
- 租户配额未超限
- 全局策略允许准入
- 触发模块:
- Admission Controller
- Resource & Quota Manager
Admitted → Scheduled
- 触发条件:
- 调度与裁决引擎完成应用级资源裁决
- 迁移结果:
- 生成组件级运行计划
- 输出Placement Hint / Resource Allocation
Scheduled → Running
- 触发条件:
- 底层Cluster OS成功创建并启动实例
- 说明:
- D-AROS不保证所有组件同时Ready
- 以"应用整体可运行"为判断标准
Running → Degraded
- 触发条件:
- 资源压力超过阈值
- 高优先级应用抢占
- 策略明确允许降级
- 行为:
- 减少副本
- 降低QoS
- 关闭非关键组件
- 恢复条件:
- 资源压力缓解
- 手动触发恢复操作
任意状态 → Terminated
- 触发条件:
- 用户主动终止
- 策略驱逐
- 不可恢复的系统异常
任意运行态 → Failed
- 触发条件:
- 连续失败超过重试策略上限
- 关键组件不可恢复失败
- 系统检测到无法继续运行的状态
6.5 生命周期驱动模型(State-Driven Control)
6.5.1 生命周期即控制入口
D-AROS明确采用:
State-Driven Control Model
即:
- 所有控制动作,必须由状态迁移触发
- 不允许直接操作底层执行实体
State Transition
↓
Reconciliation Loop
↓
Cluster Adapter Actions
6.5.2 Reconciliation Loop的职责
- 监听状态变化
- 计算当前状态与目标状态差异
- 生成最小化执行动作集合
- 将动作下发给Cluster OS Adapter
6.6 生命周期与调度系统的协作关系
生命周期系统与调度系统之间的关系为:
Lifecycle System ←→ Arbitration Engine
- 生命周期系统:
- 定义"应用处于什么阶段"
- 裁决引擎:
- 决定"该阶段是否可以推进"
👉 生命周期系统负责秩序,调度系统负责裁决
6.7 生命周期系统的边界约束(重要)
6.7.1 明确禁止的行为
- 生命周期系统不得:
- 直接调用Kubernetes Scheduler
- 感知具体Node / Pod细节
- 维护执行层瞬时状态
6.7.2 允许的最小感知
生命周期系统仅感知:
- 应用级健康状态
- 组件级Ready / Failed汇总信息
- 资源使用的聚合视图
6.8 生命周期系统的系统意义
通过引入应用级生命周期系统,D-AROS实现了:
- 应用运行状态的全局一致性
- 调度、扩缩容、降级行为的可预测性
- 控制逻辑的去命令化、去耦合
生命周期系统是D-AROS的"时间轴"与"秩序基础"
7. 多租户与权限模型(Tenant & Isolation Model)
本章定义D-AROS在多租户环境下的资源隔离、裁决优先级与权限边界模型,用于支撑共享集群中的公平性、可控性与系统安全。
7.1 设计目标
多租户模型的设计目标是:
- 支持多个租户在同一集群中并发运行应用
- 防止资源争抢导致系统失序
- 明确裁决优先级与干预权限
- 保证调度与生命周期行为可预测
多租户不是"标签隔离",而是裁决与责任的最小边界单元。
7.2 Tenant(租户)定义
Tenant是D-AROS中资源裁决与权限控制的第一层边界。
Tenant表示一个具有独立资源预算、策略边界与管理权限的逻辑实体,可能对应:
- 一个业务团队
- 一个项目组
- 一个内部客户
- 一个外部用户组织
7.2.1 Tenant的核心属性
Tenant
├── Quota(硬约束)
│ ├── ResourceQuota (CPU/Memory/GPU)
│ ├── ApplicationCount (最大应用数)
│ ├── ConcurrentWorkloads (最大并发负载数)
│ └── PriorityCeiling (优先级上限)
├── PolicySet (租户级策略)
├── Applications (所属应用列表)
├── ResourcePools (可访问的资源池)
└── AccessControl (权限配置)
7.2.2 Tenant与Application的关系
- 每个Application必须且只能属于一个Tenant
- Tenant是Application参与裁决的最小隔离域
- 不允许跨Tenant的Application合并调度或共享配额
7.3 资源隔离与裁决优先级
7.3.1 租户级配额(Quota)
Tenant Quota是硬约束,用于准入与裁决阶段:
- CPU / Memory / Device总量
- 可同时运行的Application数量
- 最大并发Workload数量
超出Tenant Quota的Application不会进入调度阶段。
7.3.2 租户优先级模型
- Tenant可配置一个Priority Ceiling
- Application Priority不得超过其Tenant的Priority Ceiling
- 裁决引擎首先在Tenant之间做资源裁决,再在Tenant内部裁决Application
Global Resource Pool
↓
Tenant-Level Arbitration(跨租户公平性)
↓
Application-Level Arbitration(租户内优先级)
7.3.3 多租户隔离维度
D-AROS提供多层次隔离:
- 资源隔离:通过Resource Pool和Quota实现
- 网络隔离:与底层CNI集成,支持租户间网络策略
- 身份隔离:基于RBAC的权限控制
- 策略隔离:租户级策略仅影响本租户应用
7.4 权限模型(Access Control)
D-AROS的权限控制遵循最小原则,基于RBAC模型:
| 角色 | 权限范围 | 典型操作 |
|---|---|---|
| Platform Admin | 全局 | 创建Tenant、设置全局策略、管理Resource Pool |
| Tenant Admin | 租户内 | 管理租户配额、策略、成员、资源池访问 |
| Application Developer | 应用级 | 创建/更新/删除应用、查看应用状态 |
| Application Operator | 应用运行时 | 启停应用、扩缩容、查看日志监控 |
明确禁止:
- Application Developer修改Tenant级策略
- Tenant越权干预其他Tenant的应用
- 平台角色滥用权限影响业务应用
7.5 多租户模型的系统意义
通过引入Tenant作为裁决与隔离的第一层边界,D-AROS实现了:
- 应用级调度的可治理性
- 共享集群环境下的公平与可控
- 平台责任与业务责任的清晰分离
8. 策略系统与治理模型(Policy & Governance)
本章定义D-AROS中策略的来源、作用域、生效顺序与治理原则,用于防止策略失控与系统复杂度膨胀。
8.1 策略系统的设计目标
- 策略可演进,但机制必须稳定
- 策略作用范围必须明确
- 策略冲突必须有确定性裁决规则
策略不是代码逻辑,而是系统约束的一部分。
8.2 策略分层模型
D-AROS定义三层策略域:
Policy Hierarchy
├── Global Policy(平台级)
├── Tenant Policy(租户级)
└── Application Policy(应用级)
8.2.1 Global Policy(平台级)
- 定义平台级调度原则
- 定义系统安全与稳定性红线
- 由Platform Team维护
示例:
- 是否允许抢占(EnablePreemption: true/false)
- 最大资源超卖比例(MaxOvercommitRatio: 1.2)
- 全局降级策略(GlobalDegradationPolicy)
- 安全策略(允许的运行时类型、镜像仓库白名单)
8.2.2 Tenant Policy(租户级)
- 定义Tenant内Application的裁决规则
- 受Global Policy约束
- 不得突破平台红线
示例:
- 租户内公平调度策略(FairShareWithinTenant)
- 成本优化策略(CostOptimization)
- 应用优先级上限(MaxApplicationPriority)
8.2.3 Application Policy(应用级)
- 定义应用自身的生命周期与弹性行为
- 只能在Tenant Policy允许范围内生效
示例:
- 弹性策略(最小/最大副本数)
- 健康检查配置
- 升级策略(滚动更新、蓝绿部署)
- 资源请求与限制
8.3 策略生效顺序与冲突处理
策略裁决遵循以下优先级:
Global Policy(最高)
↓
Tenant Policy
↓
Application Policy(最低)
冲突处理原则:
- 高层策略优先生效
- 冲突策略直接裁决失败(返回明确错误)
- 不允许"隐式覆盖"或"自动降级"
- 所有策略冲突记录审计日志
策略合并示例:
- Global: 允许最大超卖1.5倍
- Tenant: 限制超卖1.2倍
- Application: 请求超卖1.3倍
- 结果:应用获得1.2倍资源(受Tenant策略限制)
8.4 策略与机制的边界约束
明确禁止:
- 策略直接操纵Runtime
- 策略绕过生命周期系统
- 策略在执行路径中引入强依赖逻辑
策略只能影响裁决结果,不能直接产生执行动作。
8.4.1 策略执行点
策略在以下关键点生效:
- 准入控制点:Application创建/更新时
- 裁决决策点:资源分配时
- 运行时监控点:健康检查、异常检测时
- 生命周期迁移点:状态变更时
8.5 策略存储与版本管理
- 存储:所有策略对象持久化存储,支持版本历史
- 版本:策略变更产生新版本,支持回滚
- 影响分析:策略变更前预估影响范围
- 灰度发布:支持策略分批次生效
9. 控制平面可靠性与状态恢复
本章定义D-AROS控制平面的可靠性原则与状态恢复模型。
9.1 控制平面失败假设
D-AROS明确假设:
- Control Plane可能崩溃
- 网络可能分区
- 控制逻辑可能被中断
系统必须在这些条件下保持状态一致性与可恢复性。
9.2 状态持久化模型
9.2.1 必须持久化的状态
-
期望态(Desired State)
- Application Spec(完整版本历史)
- Policy定义(Global/Tenant/Application)
- Tenant配置与Quota
-
系统裁决态(System Arbitration State)
- Application Status(当前状态与历史)
- 资源分配记录
- 策略执行结果
-
审计日志(Audit Log)
- 所有状态变更
- 所有裁决决策
- 所有失败事件
9.2.2 持久化原则
- 所有状态变更必须是原子、幂等、可重放的
- 关键操作必须支持事务
- 状态存储必须支持多版本并发控制(MVCC)
9.3 重启与恢复原则
Control Plane重启后,恢复流程:
1. 加载持久化状态(唯一事实来源)
2. 重建内存状态机
3. 启动Reconciliation Loop
4. 对比期望态与现实态
5. 生成并执行恢复动作
恢复过程中的关键约束:
- 不依赖Runtime的瞬时状态:以持久化状态为准
- 幂等恢复:重复恢复操作结果一致
- 渐进恢复:优先恢复高优先级应用
9.4 禁止的行为
- 不允许在内存中维护唯一裁决状态
- 不允许"半完成"的状态迁移
- 不允许跳过生命周期系统进行恢复
- 不允许从Runtime反向重建控制平面状态
9.5 多实例高可用设计
D-AROS Control Plane支持多实例部署:
- 有状态组件:基于Raft/Paxos实现一致性
- 无状态组件:可水平扩展
- 领导者选举:关键决策由领导者执行
- 故障转移:自动检测并切换
10. 与CI/CD与发布系统的关系
本章用于明确D-AROS与应用发布、升级、回滚等流程的边界关系。
10.1 设计边界声明
D-AROS不是发布系统,也不负责:
- 镜像构建
- 版本产物生成
- 发布流水线编排
- 测试环境管理
10.2 D-AROS在发布流程中的职责
D-AROS在发布流程中承担:
-
应用版本变更的生命周期建模
- 将发布视为Application Spec的变更
- 管理多版本共存状态
-
发布过程中的资源裁决
- 确保新旧版本资源分配合理
- 处理发布期间的资源冲突
-
发布阶段的状态一致性保障
- 保证发布过程可中断、可回滚
- 维持应用整体可用性
-
发布策略执行
- 滚动更新副本替换节奏控制
- 蓝绿/金丝雀发布的实例比例管理(D-AROS负责副本数调度,流量权重切分由下层Service Mesh/Ingress控制器执行)
- 健康检查与自动回滚
10.3 与CI/CD系统的集成模式
10.3.1 集成接口
D-AROS为CI/CD系统提供:
-
Application Version API
POST /apis/v1/applications/{appId}/versions
PUT /apis/v1/applications/{appId}/versions/{version}/rollout
GET /apis/v1/applications/{appId}/rollout-status -
发布状态事件流
- 通过Webhook或消息队列推送发布状态
- 实时反馈发布进度与问题
10.3.2 协作流程示例
CI/CD系统工作流:
1. 构建新版本镜像
2. 生成新的Application Spec(V2)
3. 调用D-AROS API创建新版本
4. 触发滚动更新或蓝绿发布
5. 监控发布状态
6. 根据结果决定完成或回滚
D-AROS内部工作流:
1. 接收新版本Spec
2. 执行准入检查
3. 为新版本分配资源
4. 按策略逐步替换旧版本
5. 监控健康状态
6. 异常时自动回滚
7. 清理旧版本资源
10.4 Application Spec变更的系统语义
- Spec变更被视为期望态更新
- 生命周期系统决定是否允许状态推进
- 不允许发布系统绕过生命周期直接修改运行实体
10.4.1 版本化与回滚
- 每个Application Spec保存完整版本历史
- 支持一键回滚到任意历史版本
- 回滚操作同样经过完整的生命周期状态机
10.5 关键约束
- 发布系统不得直接操作Runtime
- 发布策略必须在Application Policy中声明
- 发布过程受Tenant Quota约束
- 异常发布必须可中止、可回滚
11. 可观测性与可解释性(Observability & Explainability)
本章定义D-AROS的系统可观测性目标,确保系统行为可理解、可追溯、可解释。
11.1 可观测性的设计目标
- 用户能回答:"发生了什么?"
- 平台能回答:"为什么这样裁决?"
- 系统能回答:"是否按设计运行?"
一个无法解释自己行为的调度系统,必然会被绕过或弃用。
11.2 关键可观测对象
11.2.1 生命周期事件流
记录所有状态迁移事件:
LifecycleEvent
├── ApplicationID
├── Timestamp
├── FromState
├── ToState
├── Trigger (user|system|policy)
├── DecisionReason
├── InvolvedPolicies[]
└── RelatedResources[]
11.2.2 裁决决策日志
每一次资源裁决必须产生完整决策记录:
ArbitrationDecision
├── DecisionID (唯一标识)
├── Timestamp
├── ApplicationID
├── ResourcePool
├── Constraints (输入约束摘要)
├── CandidateSolutions (考虑过的方案)
├── SelectedSolution (最终选择)
├── Reason (选择理由)
├── PolicyInfluences (影响的策略列表)
└── ExpectedOutcome (预期结果)
11.2.3 策略执行追踪
记录所有策略的评估与执行:
PolicyExecution
├── PolicyID
├── Scope (global|tenant|application)
├── EvaluationTime
├── InputConditions
├── EvaluationResult
├── ActionTriggered
└── EffectObserved
11.3 系统指标(Metrics)
11.3.1 核心性能指标
- 裁决延迟:从请求到决策的时间
- 状态收敛时间:期望态到现实态的收敛速度
- 资源利用率:各Resource Pool的使用率
- 应用密度:每节点/每资源池的应用数量
11.3.2 业务指标
- 应用SLA达成率:满足SLA的应用比例
- 租户满意度:基于资源分配公平性的评分
- 成本效率:资源使用 vs 成本
- 异常率:失败/降级/抢占的频率
11.3.3 系统健康指标
- Control Plane组件健康状态
- Runtime Adapter连接状态
- 存储后端性能指标
- 网络通信质量
11.4 可解释性设计
11.4.1 决策解释API
提供API解释任意决策:
GET /apis/v1/decisions/{decisionId}/explanation
返回:
- 决策上下文
- 考虑的备选方案
- 排除的方案及原因
- 影响的策略列表
- 预期效果 vs 实际效果对比
11.4.2 假设分析(What-If)接口
允许用户模拟决策结果:
POST /apis/v1/whatif/arbitration
Body: { applicationSpec, constraints }
返回:
- 预测的资源分配
- 潜在的冲突
- 建议的优化方案
11.5 集成与导出
11.5.1 标准化导出格式
- 日志:结构化JSON,兼容ELK栈
- 指标:Prometheus格式
- 追踪:OpenTelemetry/OpenTracing
- 事件:CloudEvents标准
11.5.2 可视化集成
- 预置Grafana仪表板
- 决策流程图可视化
- 时间线视图(应用生命周期历程)
- 资源拓扑图
11.6 审计与合规
11.6.1 完整审计追踪
- 记录所有系统状态变更
- 记录所有用户操作
- 记录所有策略变更
- 不可篡改、不可删除
11.6.2 合规报告
- 自动生成资源使用报告
- 策略符合性报告
- 安全审计报告
- SLA达成报告
12. 控制平面与数据平面架构
12.1 控制平面(Control Plane)组件
控制平面由以下核心组件构成:
D-AROS Control Plane
├── API Server (统一入口,认证授权)
├── State Manager (状态存储与状态机)
├── Arbitration Engine (调度裁决引擎)
├── Policy Engine (策略评估与执行)
├── Lifecycle Controller (生命周期管理器)
├── Runtime Adapter Manager (运行时适配器管理)
├── Event Bus (事件分发)
└── Metrics & Telemetry (监控遥测)
12.2 数据平面(Data Plane)
数据平面由实际运行的应用实例构成,完全由底层Cluster OS管理:
- Kubernetes Pods / Services
- 虚拟机实例
- 容器组
- 物理进程
D-AROS通过Runtime Adapter间接观测和控制数据平面,但不直接管理。
12.3 通信模式
12.3.1 控制流
User/Platform → API Server → State Manager
↓
Policy Engine(策略评估)
↓
Arbitration Engine(资源裁决)
↓
Lifecycle Controller
↓
Runtime Adapter Manager
↓
Cluster OS (K8s/Nomad/etc.)
12.3.2 数据流
Cluster OS → Runtime Adapter → Event Bus → State Manager
↓
Metrics & Telemetry
13. 安全考量
13.1 安全模型概览
D-AROS的安全设计贯穿所有层次:
- 身份与访问控制:基于RBAC的多租户权限模型
- 网络安全:控制平面通信加密,最小网络暴露
- 运行时安全:通过策略控制允许的运行时类型
- 数据安全:状态存储加密,敏感信息保护
- 审计与合规:完整操作日志,不可篡改
13.2 关键安全机制
13.2.1 控制平面安全
- mTLS:所有内部组件间通信使用双向TLS
- 细粒度RBAC:基于角色的最小权限原则
- 审计日志:所有操作记录,支持安全分析
- Secret管理:与外部Secret管理服务集成(如Vault)
13.2.2 运行时安全策略
通过Global Policy控制:
- 允许的RuntimeType列表
- 镜像仓库白名单
- 虚拟机安全基线
注意:容器运行时特有的安全配置(如seccomp、AppArmor、Capabilities限制)属于运行时实现细节,由对应的 Runtime Adapter(如Kubernetes Container Runtime Adapter)在将 Placement Hint 翻译为 PodSpec 时负责注入。D-AROS Global Policy 仅声明"该应用必须满足最低安全基线",具体技术实现由 Adapter 承担,以维持运行时中立原则。
13.2.3 网络安全集成
- 与底层CNI集成,支持网络策略
- 租户间网络隔离
- 控制平面网络与数据平面网络分离
14. 演进路径(Evolution Roadmap)
本章描述D-AROS系统的渐进式演进计划,体现设计的务实性与可实施性。
14.1 Phase 1:核心框架与单运行时支持
目标:验证核心架构,支持Kubernetes容器运行时。
关键能力:
- Application/Workload基本抽象
- 单运行时(K8s Container)支持
- 基础生命周期状态机
- 简单的准入控制与裁决
- 基础可观测性
技术选型:
- 存储:etcd(状态持久化)
- 运行时:Kubernetes Runtime Adapter
- 部署:单控制平面实例
成功标准:
- 能在K8s集群上部署运行
- 支持创建、运行、停止简单应用
- 基础监控指标可采集
14.2 Phase 2:多运行时与生产就绪
目标:支持多运行时,达到生产可用性。
关键能力:
- 多运行时支持(VM、Windows容器)
- 完整的多租户模型
- 策略引擎基础框架
- 高可用控制平面
- 完整的可观测性套件
技术扩展:
- 新增Runtime Adapter:KubeVirt、Windows容器
- 策略引擎实现
- 多实例高可用架构
成功标准:
- 支持混合运行时部署
- 多租户资源隔离
- 99.9%控制平面可用性
- 完整的决策解释能力
14.3 Phase 3:高级调度与智能优化
目标:实现智能调度与自动化优化。
关键能力:
- 高级裁决策略(成本感知、SLA优化)
- 预测性伸缩与调度
- 自适应降级与恢复
- 策略市场与共享
- 与CI/CD深度集成
技术深化:
- 机器学习辅助决策
- 历史数据分析与模式识别
- 策略市场与社区贡献
成功标准:
- 资源利用率提升20%
- SLA违规减少50%
- 运维自动化程度>80%
14.4 Phase 4:生态系统与扩展性
目标:构建繁荣的生态系统。
关键能力:
- 插件化架构全面开放
- 第三方Runtime Adapter支持
- 跨云跨集群协同
- 标准制定与生态建设
生态建设:
- SDK与开发者工具
- 认证与兼容性计划
- 开源社区建设
15. 参考与设计来源
- Kubernetes官方文档
https://kubernetes.io/docs/ - Borg: Large-scale cluster management at Google
https://research.google/pubs/pub43438/ - Omega: Flexible, scalable schedulers for large compute clusters
https://research.google/pubs/pub41684/ - Apache Mesos
https://mesos.apache.org/ - HashiCorp Nomad
https://www.nomadproject.io/ - CloudEvents规范
https://cloudevents.io/ - OpenTelemetry
https://opentelemetry.io/
16. 术语表(Glossary)
| 术语 | 定义 |
|---|---|
| Application | 由多个组件构成、具有整体运行目标的业务单元 |
| Application Instance | Application的具体运行实例,包含运行时状态与版本信息 |
| Arbitration(裁决) | 在多应用、多约束条件下做出的资源与优先级决策 |
| Cluster OS | 负责节点与资源调度的分布式集群内核(如Kubernetes) |
| D-AROS | Distributed Application Runtime Operating System,本文档描述的系统 |
| Desired State(期望态) | 用户通过Application Spec声明的目标状态,驱动系统收敛 |
| Execution Node | 可以承载Workload的执行实体抽象 |
| Lifecycle Controller | 负责驱动Application Instance在各生命周期状态间迁移的核心控制组件 |
| Observed State(现实态) | 系统通过Runtime Adapter感知到的当前实际运行状态 |
| Placement Hint | 裁决引擎输出的Workload级放置建议,传递给Runtime Adapter执行 |
| Policy Engine | 负责在准入、裁决、状态迁移等关键点评估并执行策略规则的组件 |
| Reconciliation Loop | 持续比较期望态与现实态差异、生成并执行最小化修复动作的控制循环 |
| Runtime | Workload实际执行的技术载体(容器/虚拟机/进程) |
| Runtime Adapter | 连接D-AROS与具体运行时的适配器组件 |
| Runtime-Agnostic | 运行时中立,不依赖特定运行时技术 |
| Tenant | 多租户环境中的资源隔离与权限边界单元 |
| Workload | D-AROS中可被调度和执行的最小单位,运行时中立抽象 |
17. 总结
D-AROS并非重新实现一个分布式内核,而是:
将操作系统的设计思想,上移到"分布式应用运行时"这一层级。
通过清晰的抽象分层(应用、负载、运行时)、严格的责任边界(不替代K8s)、以及以状态机为核心的控制模型,D-AROS旨在解决云原生环境下应用调度的结构性挑战。
其核心价值在于为复杂分布式应用提供:
- 可预测的运行环境:通过应用级状态机和生命周期管理
- 可裁决的资源使用模型:在多租户、多约束条件下的智能决策
- 可持续演进的系统抽象:运行时中立的设计支持技术演进
- 可解释的系统行为:完整的可观测性与决策透明度
D-AROS不是终点,而是一个起点——一个重新思考"分布式应用应该如何被管理和调度"的起点。通过分阶段的演进计划,它将从概念验证逐步成长为生产就绪的系统,最终构建起繁荣的生态系统。